3D MultiArmを使った半球・全球撮影
対象製品:
起動
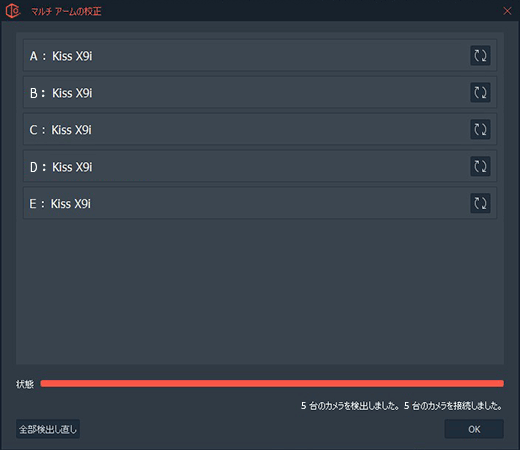
ソフトウェアの起動時に、カメラ認識(校正)ウィンドウが起動します。
- ライトボックスまたはターンテーブルに、何か適当な被写体を置いてください
- カメラが自動で撮影を行い、順番に接続を確認します
- 全てのカメラが認識できたら、次に進みます
カメラのピント合わせに使用するため、色味がはっきりしていて、小さすぎないものが校正しやすいです

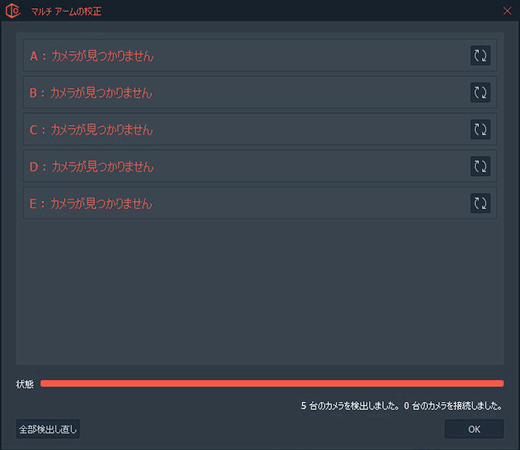
「カメラが見つかりません」のエラーが表示される
カメラの検出数が0台(または実際のカメラ数と異なる)の場合
カメラの電源が入っていない、またはカメラと機材のUSB接続に問題がある可能性があります。
カメラの接続数が0(または実際のカメラ数と異なる)の場合
カメラの自動撮影で、ピントが合わないため、撮影エラーになっている可能性があります。カメラの角度やズーム、被写体の位置などを調整して再検出してください。
セッティング
半球・全球撮影での撮影は、カメラの向きや被写体の位置などの準備が大切です。
カメラをターンテーブルの中心に向ける
カメラがターンテーブルの中心を向くように調整します。俯瞰のカメラを基本に調整するのがおすすめです。

被写体をターンテーブルの中心に置く
被写体をターンテーブルの中心にセットします。こちらも俯瞰のカメラを基準に設置するのがおすすめです。

被写体が回転したときに、撮影枠から飛び出さないよう注意してください。
すべてのカメラで被写体が同じ大きさに写るように、ズームを手動調整
ソフトウェア画面のグリッド線を使って、どのカメラからも同じくらいの大きさで被写体が撮影できるように調整してください。
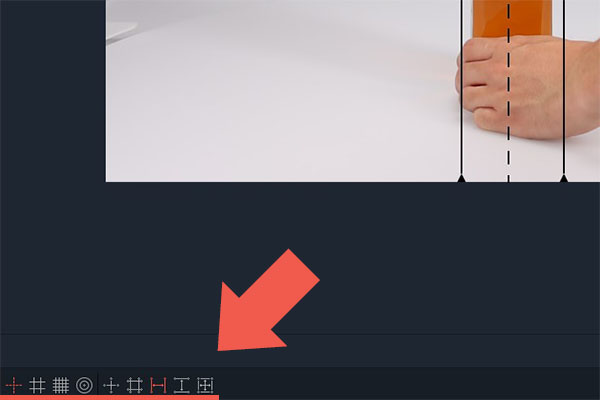
幅が同じになるように調整してください。縦位置は後から編集で調整が可能です。
切り取り枠プロファイルを縦長に設定
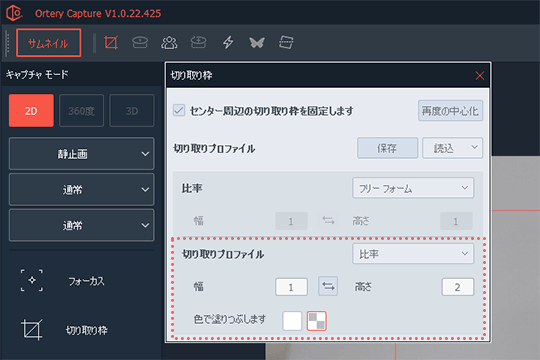
幅・高さの比率を縦長になりように数値を設定してくおくと、後の編集が行いやすいのでおすすめです。
撮影方法
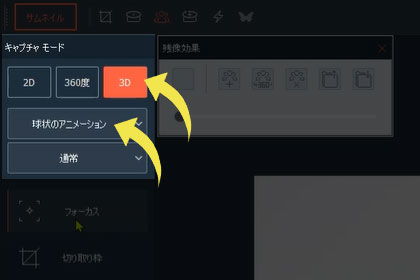
- 撮影画面から「3D」、その下は「球状(または半球状)のアニメーション」を選択します
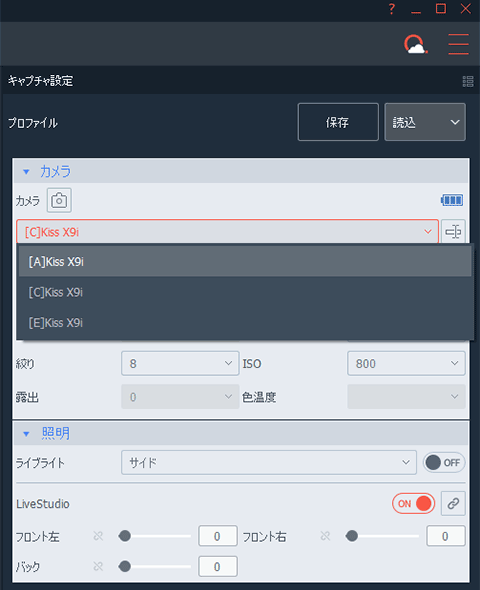
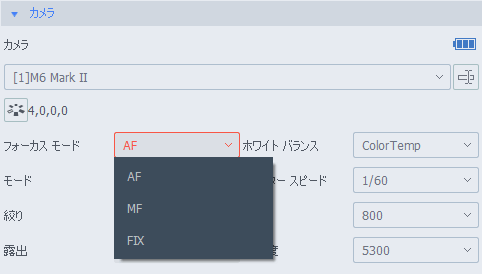
- カメラ設定や照明環境を必要に応じて調整します
- フォーカスモードは「AF」(オート)もしくは「FIX」(固定)に設定します
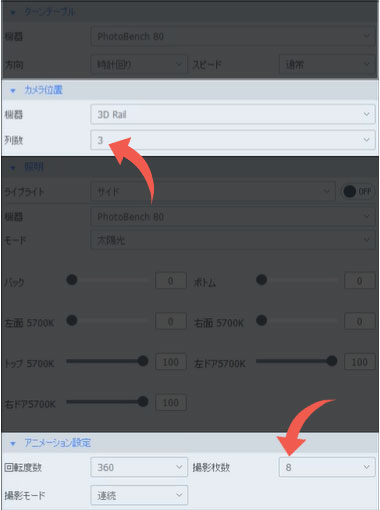
- 列数や、撮影枚数などを設定します
- 「シャッター」を押して撮影を開始します
被写体反転(全球撮影のみ)
半球撮影終了後、被写体を上下反転させて再度撮影します

撮影画像の調整
各列の撮影画像の比率や被写体位置を調整します
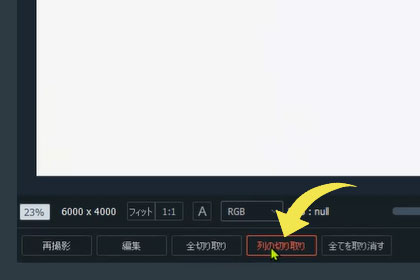
それぞれ角度から撮影した画像に対して、枠の中心と被写体の中心を合わせるように位置を調整すると、キレイに回転するアニメーションに近づきます。枠の比率などを保存したいサイズに合わせて変更できます。
調整が終わったら画面右下の「適用」をクリックし、その後「次へ」をクリックします
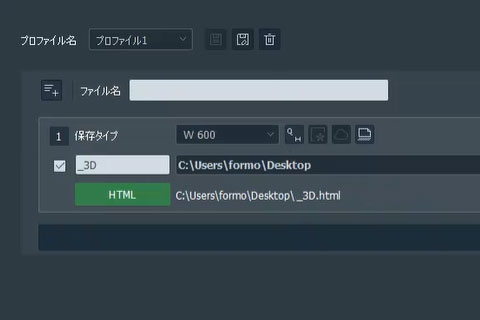
保存
アニメーション形式で保存する場合「HTML」フォーマットを選択してください
「JPG」や「PNG」を選択すると、撮影画像を画像ファイルとして保存できます